VMIVME-2510B VMIC 超级模块 烽台科技:保护工业互联网安全数据要素是实现数字化发展的关键
近年来,数字化推动了城市和工业互联网结合,成为了推进下一阶段我国城市高质量发展的主要思路,而这其中工业互联网安全数据要素与数字安全运营实践成为未来发展中重要一环。烽台科技董事长魏钦志受邀参加全国计算机安全学术交流会,并在会上与各行业专家共同分享了公司在数字安全运营实践中保护工业互联网安全数据要素的“那些事”。
2022年12月,中共中央、国务院印发《关于构建数据基础制度更好发挥数据要素作用的意见》,成为我国数字中国和数据要素市场建设的纲领性文件,对释放数据要素的经济和社会价值具有根本性的意义。随着数据要素激发数字中国建设动力的同时,也暴露出来了各种对数据安全的挑战。
数据要素价值凸显,工业数据安全不容忽视。魏钦志董事长表示,工业产业处于数字化转型进程中的成长期,工业互联网安全是每个工业企业数字化转型的基础和关键,只有保护好关键数据和系统中的一系列工业互联网安全数据要素,才能确保工业企业数字化转型的顺利进行。
通过多年的经验积累以及在工业领域的持续深耕,烽台科技已具备对工业主机、工业中间件、实时数据库、工业安全设备、工业组态软件、工业网络设备、控制设备、工业机器人、传感器等核心工业软硬件中的工业安全数据要素的采集能力。
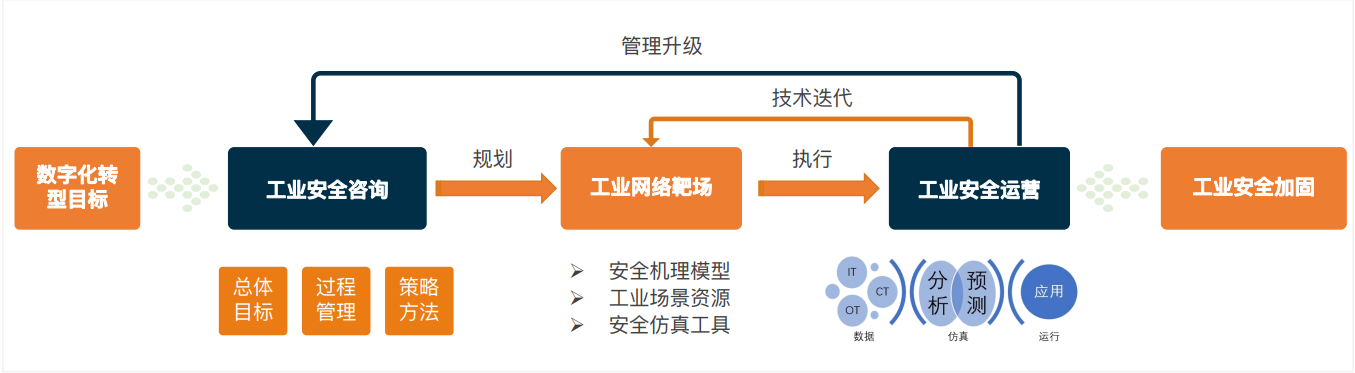
在行业应用方面,烽台科技结合传统工厂到智慧工厂的发展过程,为工业用户考虑工业数据采集、工业数据存储、工业数据分析、工业数据预测、工业数据资产价值变现等关乎于数据全生命周期的安全问题,形成了以生产信息系统为单元,可集成于企业数据中台/数据湖/工业互联网平台,生产信息化数据采集、传输、应用全过程安全监测保障为一体的解决方案。目前,该方案已在钢铁冶金、石油化工、轨道交通、智能制造、电力电网、智慧园区等重点行业的核心工艺流程中使用,为工业用户解决了诸多实际与潜在问题。
工业互联网的数字化转型是全球工业产业的未来趋势,而安全则是基础。烽台科技将继续研发和推出更多工业互联网安全解决方案,助力工业用户实现安全、高效、智能的数字化发展。同时,我们也希望与越来越多的工业用户共同构建安全可靠的工业互联网环境,迎接数字化时代的挑战和机遇。

VMIVME-2510B